|
La gara per la
partenza |
Ma
più laser non sono necessariamente meglio di uno. L’IRV, la jeep
automatica della squadra Indy Robot Racing, ne usava undici.
Tuttavia, durante le prove di qualificazione, i sensori del veicolo hanno
perso la coordinazione, la jeep è finita contro le balle di
paglia, ha preso fuoco ed è stata eliminata. Senza un’accurata
calibrazione, gli scanner laser collocano gli ostacoli nei punti
sbagliati sulla mappa interna del robot.
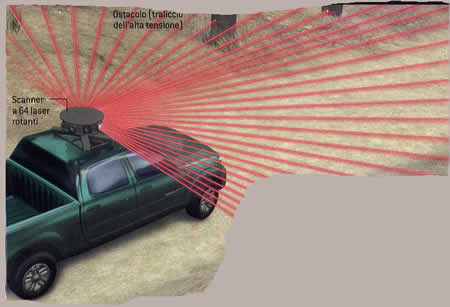
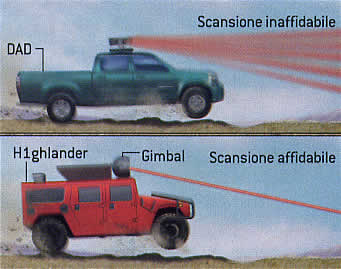
David
Hall, tel team Dad, con sede a Morgan Hill in California, ha
realizzato un nuovo tipo di sensore laser che affronta il problema della
calibrazione fissando 64 laser all’interno di una piattaforma circolare
che compie dieci giri al secondo (come si legge nel riquadro Robot che
vedono oltre gli ostacoli.) Nelle prove pre-gara, il sensore era in
grado di rilevare la presenza di ostacoli delle dimensioni di una persona
da una distanza di circa ottanta metri.
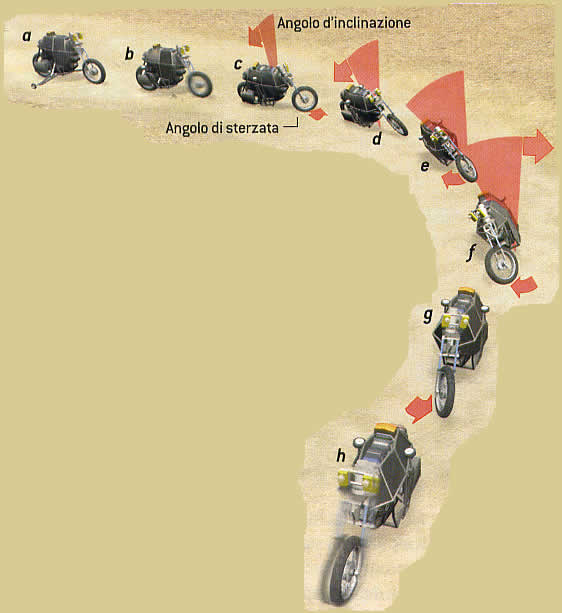
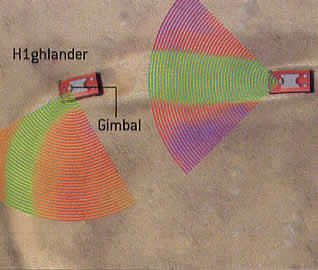
Il
Red Team ha adottato un approccio differente, ma innovativo, con
due dei suoi robot. Entrambi hanno un singolo laser, ma che fa il lavoro
di molti perché ruota e si inclina sulla cima di un braccio articolato
chiamato gimbal. Il laser può inclinarsi in sù e in giù quando
il veicolo affronta una salita o una discesa, e ruotare a destra o a
sinistra se c’è una curva.
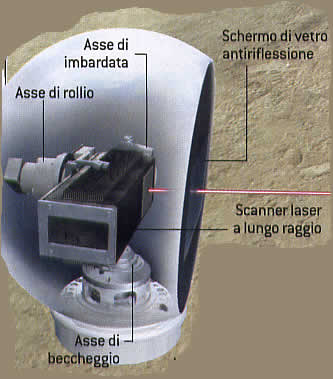
Gli
ingegneri del Red team hanno montato anche giroscopi a fibra ottica
su ciascuno dei tre assi del gimbal e li hanno collegati ad alcuni
meccanismi che stabilizzano il laser in modo da mantenerlo in asse anche
quando il veicolo compie un salto. Purtroppo, però, il team non è
riuscito a integrare la stabilizzazione con gli altri sistemi in tempo
utile per impiegarli nella gara. Ma sia Motion Zero, una società
appena lanciata dal Blue Team di Berkeley, in California, sia HD
Systems di Hauppage, nello stato di New York, stanno miniaturizzando
la tecnologia e intendono metterla in commercio.
Il
cammino verso il futuro
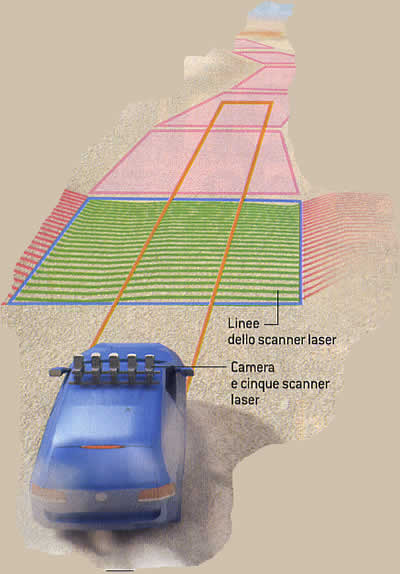
Per
quanto siano indispensabili, i laser hanno alcuni inconvenienti. Hanno un
costo variabile tra i 25.000 e i 100.000 dollari, quindi realizzare scanner
laser ad ampio raggio costa parecchio. Altri tipi di sensori, come le
videocamere e i radar, possono “vedere” più lontano, pur costando
meno; ma anche questi strumenti hanno dei punti deboli, e producono fiumi
di dati che sono difficili da elaborare. Numerosi gruppi hanno
equipaggiato i loro robot con una combinazione di sensori, ma solo alcuni
sono riusciti a integrare le varie tecniche in modo da avere un modello
dal cammino sicuro e veloce. |
|
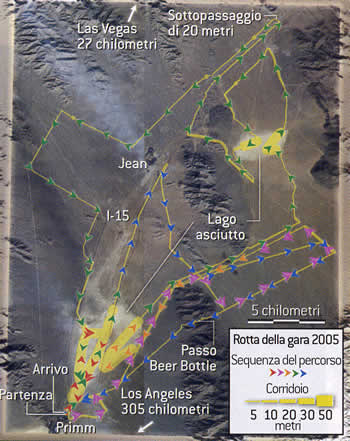
Per le
semifinali della Grand Challenge, il 28 settembre 2005 sulla pista
del California Speedway di Fontana sono scesi in campo 43 robot. Negli
otto giorni della manifestazione ognuno di essi avrebbe avuto quattro chance
di provare la propria velocità lungo i tre chilometri e più del
percorso, che i responsabili avevano disseminato di cancelli, macchine
parcheggiate, pile di pneumatici e una galleria che bloccava la ricezione
GPS. Chris Urmson del Red Team e Sebastian Thrun dello Stanford
Racing Team hanno osservato la competizione dalle tribune.
Mentre guardava
i robot presenti - dalle minimoto da cento chili ai mezzi militari da 16
tonnellate - il viso di Urmson si è aperto in un sorriso: “Questo
potrebbe essere lo spettacolo più interessante che abbia mai visto!” ha
esclamato. |
|
I
veicoli in mostra sono stati selezionati in un folto gruppo. La DARPA ha
accettato le richieste di partecipazione di 195 squadre, fra cui tre
scuole superiori, 35 università e tutti i 15 finalisti della Grand
Challenge 2004. Molte università di prestigio che non avevano
partecipato alla prima gara - come Stanford, Cornell, Princeton,
l’Università della California di Los Angeles e il Massachusetts
Institute of Technology (MIT) - hanno partecipato alla seconda.
Solo
118 squadre hanno superato la prima selezione, basata su un documento
tecnico e su una ripresa video del veicolo in azione. In maggio, i
funzionari della DARPA hanno visitato ciascuna squadra per un’ispezione
sul posto e una dimostrazione di una corsa a zig zag. Gli stessi
funzionari hanno cronometrato ciascun robot nell’arco di tre giri di
pista e piazzato bidoni dell’immondizia sul suo cammino per testarne la
capacità di evitare gli ostacoli.
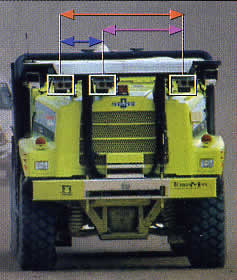
Le
squadre tecnicamente più avanzate hanno inviato i loro robot su un quarto
percorso, più lungo, per mostrarne le capacità di guida automatica. Alle
Cedar Rapids, nell’Iowa, il veicolo Oshkosh del team Terramax è
riuscito a far passare i suoi due metri e mezzo di larghezza fra i coni
spartitraffico evitandoli di qualche centimetro. Nei dintorni di una
vecchia acciaieria di Pittsburgh, l’H1ghlander del Red Team
ha viaggiato a 40 chilometri all’ora su una strada cosparsa di pietrisco
e si è infilato agevolmente nel sottopasso di una ferrovia.
Fin
dal primo giorno di qualificazione è stato chiaro che in appena 18 mesi
la tecnologia aveva fatto passi da gigante. Undici dei 43 concorrenti
hanno completato il percorso a ostacoli al primo tentativo, e alla fine
della prova sono stati 25 i robot qualificati, alcuni dei quali avevano
toccato i 64 chilometri orari. Due dei finalisti erano rimasti seriamente
danneggiati e sono stati perciò eliminati. E la DARPA ha inviato gli
altri 23 a Primm, nel Nevada, per tentare di accaparrarsi il premio da due
milioni di dollari. |



La
selezione. Il Manticore del MIT (in alto)
ha fallito la prova. L’IRV, fabbricato dall’Indy Robot Racing,
ha preso fuoco sulle balle di paglia a Fontana (al centro).
Il Team ENSCO è rimasto in gara per il premio finché il suo robot Dexter
(in basso) non è finito contro un masso al chilometro 130 del
percorso. |